Robomind adalah sebuah game opensource tentang
bagaimana mengendalikan pergerakan sebuah robot melalui perintah-perintah
menggunakan bahasa pemrograman. Game yang dibuat oleh Arvid Halma dari
Universitas Amsterdam ini dapat didownload di URL http://www.robomind.net .
Untuk
Anda Programmer Pemula Robomind adalah game ini yang patut Anda coba. Selain
menghibur, game ini juga bermanfaat untuk sekaligus kita belajar tentang
pemrograman. Game ini memadukan antara bahasa program untuk mengendalikan
sebuah robot.
Untuk
menjalankan/mengendalikan robot yang ada di game, memelurkan bahasa
pemrograman. Robot di dalam game ini bisa bergerak maju, mundur, kesamping,
belok kanan/kiri, dan juga dapat berjalan sambil mengecat jalan yang sudah
dilaluinya.
Menjalankan program RoboMind
- Pastikan komputer kamu sudah aktif
- Klik Start pada Windows
- Pilih All Programs
- Pilih Robo
- Lalu pilih RoboMind
 maka akan terlihat lembar kerjanya seperti berikut :
maka akan terlihat lembar kerjanya seperti berikut :
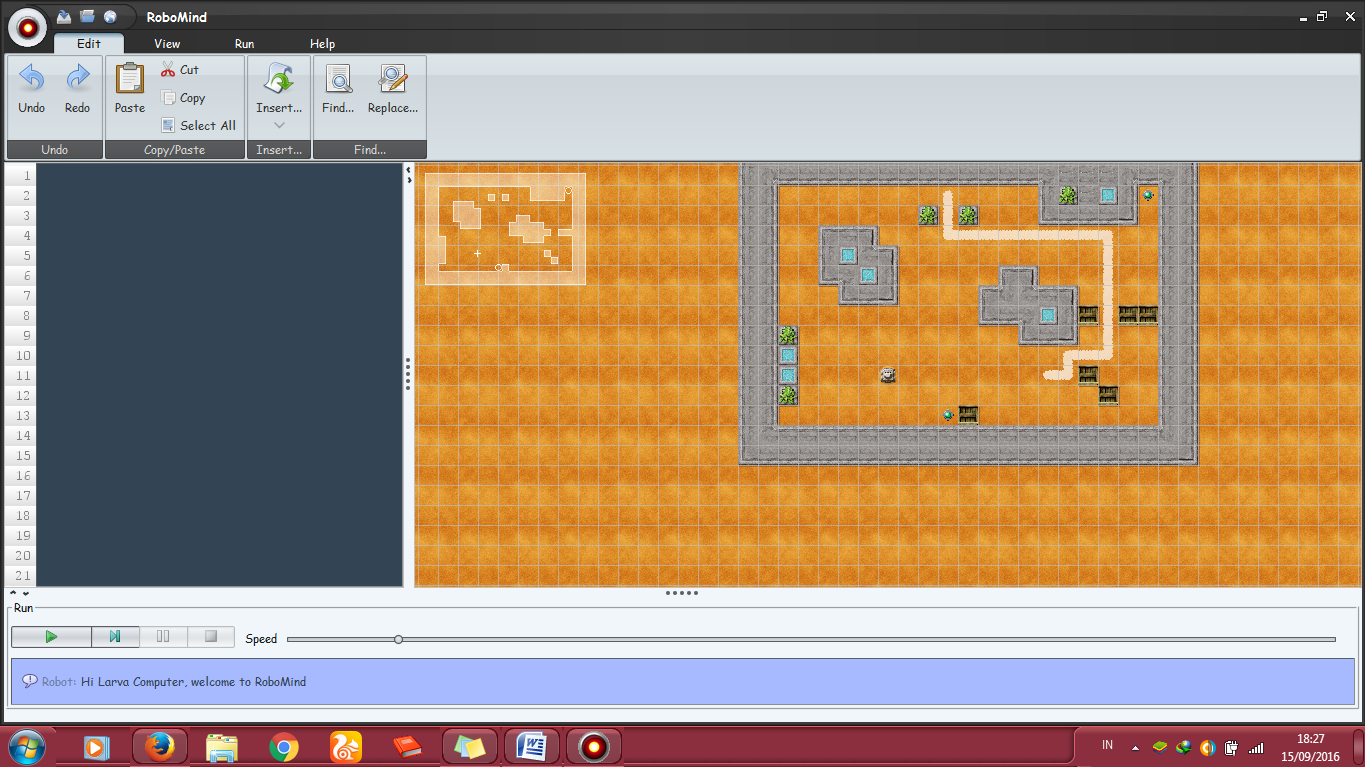
 Lembar Kerja RoboMind
Lembar Kerja RoboMind
Lingkungan pengembangan RoboMind memungkinkan Kamu untuk menulis
program yang akan dilakukan oleh robot simulasi. Ini terdiri dari bagian
berikut:
 Script panel
Script panel
Di area teks ini kamu dapat menuliskan tugas kamu dalam bentuk skrip yang robot akan tampil.
World panel
Disini kamu melihat keadaan saat ini robot dalam lingkungannya.
Karena ini adalah seluruh lingkungan di mana robot hidup, kita hanya
akan menyebutnya dunia.
Run panel
Setelah memutuskan scriptnya, di sini kamu dapat membiarkan robot
memulai (atau berhenti). Ini juga mungkin untuk menyesuaikan kecepatan
di mana robot beroperasi.
Message panel
Dalam kasus script yang aneh, Kamu akan menerima kesalahan kompilasi
di sini. Ini juga merupakan tempat di mana robot dapat memberitahukan
peristiwa-peristiwa tertentu.
Menu File Robomind
- New :Membuka lembar kerja baru
- Open : Membuka program Robomind yang sudah pernah dibuat
- Save : Menyimpan program
- Save as : Menyimpan kembali program dengan nama yang lain
- Translate Script : Menerjemahkan bahasa
- Open Map : Memilih peta yang tersedia pada Robomind
- Setting : Mengatur program Robomind
 Menu Edit Robomind
Menu Edit Robomind
- Undo : Kembali ke aksi sebelumnya
- Redo : Kembali ke aksi yang sudah di undo
- Cut : Memotong
- Copy : Menggandakan
- Paste : Menyalin
- Select all : Memilih semua
- Insert : Memasukkan perintah – perintah
- Find : Mencari
- Find next : Mencari selanjutnya
- Replace : Mengganti


Berikut ini beberapa perintah dasar untuk mengatur gerakan si robot.
- forward(n) : Memindahkan n langkah maju
- backward(n): Memindahkan n langkah mundur
- left() : Membelokkan ke kiri 90 derajad
- right() : Membelokkan ke kanan 90 derajad
- north(n) : Membelokkan ke utara, lalu bergerak maju nlangkah
- south(n) : Membelokkan ke selatan, lalu bergerak maju nlangkah
- west(n) : Membelokkan ke barat, lalu bergerak maju nlangkah
- east(n) : Membelokkan ke timur, lalu bergerak maju nlangkah
Robot juga bisa disuruh mewarnai path yang dilalui, dengan perintah berikut ini:
- paintWhite() : Mewarnai dengan warna putih pada path
- paintBlack() : Mewarnai dengan warna hitam pada path
- stopPainting() : Menyuruh robot berhenti mewarnai
Selain mewarnai path yang dilalui, si robot juga bisa disuruh
mengambil obyek dan meletakkannya kembali. Berikut ini beberapa perintah
untuk melakukan hal tersebut:
- pickUp() : Mengambil obyek yang ada di depannya
- putDown() : Meletakkan obyek di depannya
Menu View Robomind
- Zoom in : untuk mengecilkan layar peta
- Zoom out : untuk membesarkan layar peta
- Show grid : untuk menampilkan garis – garis
- Show radar : untuk menampilkan arahan letak robot dan peta
- Track robot : untuk menampilkan track robot
- Create screen dump
Menu Run Robomind
- Execute : untuk menjalankan program
- Step : untuk mengakhirkan program
- Pause : untuk menghentikan sementara
- Stop : untuk memberhentikan program
Remote control :
- Panah ke atas : untuk mengarahkan robot ke depan / maju
- Panah ke bawah : untuk mengarahkan robot ke belakang / mundur
- Panah ke kanan : untuk mengarahkan robot ke kanan
- Panah ke kiri : untuk mengarahkan robot ke kiri
- Reset : untuk mengembalikkan ke tempat semula
 Menu Help RoboMind
Menu Help RoboMind
- Help Topic : Petunjuk tentang topik yang ada di RoboMind
- RoboMind Online: Menuju website http://www.robomind.net/
- About roboMind : Informasi tentang RoboMind (versi, pembuat, tahun pembuatan, website RoboMind)
 |
| software Robomind |
Berikut
ini beberapa perintah dasar untuk mengatur gerakan si robot.
- forward(n),
digunakan untuk menggerakan maju si robot n langkah
- backward(n),
digunakan untuk menggerakan ke belakang si robot n langkah
- left(),
digunakan untuk membelokkan si robot ke kiri 90 derajad
- right(),
digunakan untuk membelokkan si robot ke kanan 90 derajad
- north(n),
digunakan untuk mengarahkan robot ke utara, lalu bergerak maju n langkah
- south(n),
digunakan untuk mengarahkan robot ke selatan, lalu bergerak maju n langkah
- west(n),
digunakan untuk mengarahkan robot ke barat, lalu bergerak maju n langkah
- east(n),
digunakan untuk mengarahkan robot ke timur, lalu bergerak maju n langkah
Robot
juga bisa disuruh mewarnai path yang dilalui, dengan perintah berikut ini
- paintWhite(),
menyuruh robot mewarnai dengan warna putih pada path
- paintBlack(),
menyuruh robot mewarnai dengan warna hitam pada path
- stopPainting(),
menyuruh robot berhenti mewarnai
Selain
mewarnai path yang dilalui, si robot juga bisa disuruh mengambil obyek dan
meletakkannya kembali. Berikut ini beberapa perintah untuk melakukan hal
tersebut:
- pickUp(),
mengambil obyek yang ada di depannya
- putDown(),
meletakkan obyek di depannya
Sedangkan
untuk struktur pemrograman untuk bentuk IF, berikut ini sintaksnya:
if
(syarat)
{
instruksi
}
atau
if
(syarat)
{
instruksi
}
else
{
instruksi
}
Bagaimana
dengan bentuk loopingnya? Ada beberapa bentuk looping dalam RoboMind ini, ini
dia macam-macam bentuk looping
repeat(n)
{
instruksi
}
Bentuk
looping di atas digunakan untuk mengulangi instruksi sampai dengan n kali
(mirip dengan struktur FOR i:=1 TO n DO dalam Pascal).
Ada
pula bentuk looping seperti di bawah ini
repeatWhile(syarat)
{
instruksi
}
Struktur
looping di atas mirip dengan struktur WHILE (syarat) DO dalam Pascal.
Di
bawah ini contoh sebuah program untuk menyuruh robot mengikuti jalan berwarna
putih.
#
belok ke kanan
right()
#
maju 8 langkah
forward(8)
#
looping
repeat()
{
# cek apakah ada jalan berwarna putih di
depannya
if(frontIsWhite()){
# jika ada, maka maju satu langkah
forward(1)
}
# cek apakah ada jalan berwarna putih di
sebelah kanannya
else if(rightIsWhite()){
# jika ada, belok kanan
right()
}
# cek apakah ada jalan berwarna putih di
sebelah kirinya
else if(leftIsWhite()){
# jika ada, belok kiri
left()
}
# cek apakah di depan robot terdapat halangan
else if(frontIsObstacle()){
# jika ada, robot berhenti (stop)
end
}
}
SUMBER REFERENSI
:
Read More









{kind=link}